[Hindi / Urdu] Arduino Project Obstacle Avoiding Robot
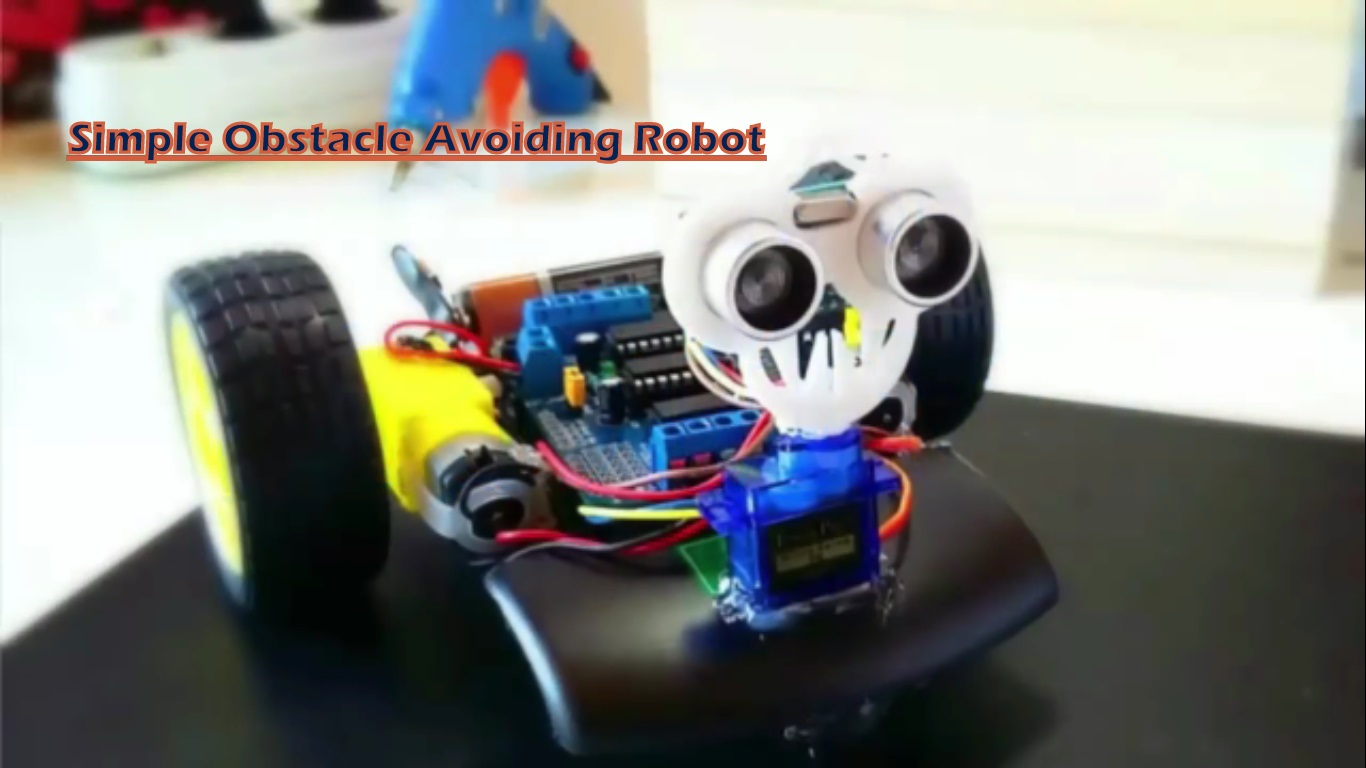
This Tutorial is for anyone getting started with arduino. We will be building an obstacle avoiding robot that uses an ultrasonic HC SR-04 sensor to detect objects.
Hardware Required
* Arduino Board
* Adafruit Motor Shield
* HC-SR04 Ultrasonic Module Distance Sensor for Arduino
* Tower Pro SG90 RC Mini Servo Motor
* Bracket / Holder for HC-SR04
* DC Motors and Wheels
* Bovine Wheel
* Plate or something like that
* Wires
* Battery Buckle 9V
* Battery 9V
* Glue Gun or Cable Ties
Install AFMotor.h library;
https://learn.adafruit.com/adafruit-motor-shield/library-install
Download and install NewPing.h library
https://bitbucket.org/teckel12/arduino-new-ping/downloads
How to use NewPing;
http://playground.arduino.cc/Code/NewPing
How to install library;
https://www.arduino.cc/en/Guide/Libraries
Get the Code:
#include <AFMotor.h>
#include <Servo.h>
#include <NewPing.h>
#define TRIG_PIN A4
#define ECHO_PIN A5
#define MAX_DISTANCE_POSSIBLE 1000
#define MAX_SPEED 150 //
#define MOTORS_CALIBRATION_OFFSET 3
#define COLL_DIST 20
#define TURN_DIST COLL_DIST+10
NewPing sonar(TRIG_PIN, ECHO_PIN, MAX_DISTANCE_POSSIBLE);
AF_DCMotor leftMotor(4, MOTOR12_8KHZ);
AF_DCMotor rightMotor(3, MOTOR12_8KHZ);
Servo neckControllerServoMotor;
int pos = 0;
int maxDist = 0;
int maxAngle = 0;
int maxRight = 0;
int maxLeft = 0;
int maxFront = 0;
int course = 0;
int curDist = 0;
String motorSet = "";
int speedSet = 0;
void setup() {
neckControllerServoMotor.attach(10);
neckControllerServoMotor.write(90);
delay(2000);
checkPath();
motorSet = "FORWARD";
neckControllerServoMotor.write(90);
moveForward();
}
void loop() {
checkForward();
checkPath();
}
void checkPath() {
int curLeft = 0;
int curFront = 0;
int curRight = 0;
int curDist = 0;
neckControllerServoMotor.write(144);
delay(120);
for(pos = 144; pos >= 36; pos-=18)
{
neckControllerServoMotor.write(pos);
delay(90);
checkForward();
curDist = readPing();
if (curDist < COLL_DIST) {
checkCourse();
break;
}
if (curDist < TURN_DIST) {
changePath();
}
if (curDist > curDist) {maxAngle = pos;}
if (pos > 90 && curDist > curLeft) { curLeft = curDist;}
if (pos == 90 && curDist > curFront) {curFront = curDist;}
if (pos < 90 && curDist > curRight) {curRight = curDist;}
}
maxLeft = curLeft;
maxRight = curRight;
maxFront = curFront;
}
void setCourse() {
if (maxAngle < 90) {turnRight();}
if (maxAngle > 90) {turnLeft();}
maxLeft = 0;
maxRight = 0;
maxFront = 0;
}
void checkCourse() {
moveBackward();
delay(500);
moveStop();
setCourse();
}
void changePath() {
if (pos < 90) {lookLeft();}
if (pos > 90) {lookRight();}
}
int readPing() {
delay(70);
unsigned int uS = sonar.ping();
int cm = uS/US_ROUNDTRIP_CM;
return cm;
}
void checkForward() { if (motorSet=="FORWARD") {leftMotor.run(FORWARD); rightMotor.run(FORWARD); } }
void checkBackward() { if (motorSet=="BACKWARD") {leftMotor.run(BACKWARD); rightMotor.run(BACKWARD); } }
void moveStop() {leftMotor.run(RELEASE); rightMotor.run(RELEASE);}
void moveForward() {
motorSet = "FORWARD";
leftMotor.run(FORWARD);
rightMotor.run(FORWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2)
{
leftMotor.setSpeed(speedSet+MOTORS_CALIBRATION_OFFSET);
rightMotor.setSpeed(speedSet);
delay(5);
}
}
void moveBackward() {
motorSet = "BACKWARD";
leftMotor.run(BACKWARD);
rightMotor.run(BACKWARD);
for (speedSet = 0; speedSet < MAX_SPEED; speedSet +=2)
{
leftMotor.setSpeed(speedSet+MOTORS_CALIBRATION_OFFSET);
rightMotor.setSpeed(speedSet);
delay(5);
}
}
void turnRight() {
motorSet = "RIGHT";
leftMotor.run(FORWARD);
rightMotor.run(BACKWARD);
delay(400);
motorSet = "FORWARD";
leftMotor.run(FORWARD);
rightMotor.run(FORWARD);
}
void turnLeft() {
motorSet = "LEFT";
leftMotor.run(BACKWARD);
rightMotor.run(FORWARD);
delay(400);
motorSet = "FORWARD";
leftMotor.run(FORWARD);
rightMotor.run(FORWARD);
}
void lookRight() {rightMotor.run(BACKWARD); delay(400); rightMotor.run(FORWARD);}
void lookLeft() {leftMotor.run(BACKWARD); delay(400); leftMotor.run(FORWARD);}
!!! If you see this error; 'No such file or directory' Please see this tutorial;https://youtu.be/Es8D1q_b-c4

You're a thief! Labor thief! I reported your channel to YouTube Copyright Agent! Your channel will be shut down!
ReplyDelete